Development of motor cortical interfaces for the control of reaching, grasping and locomotion
Cortical control of FES for grasp
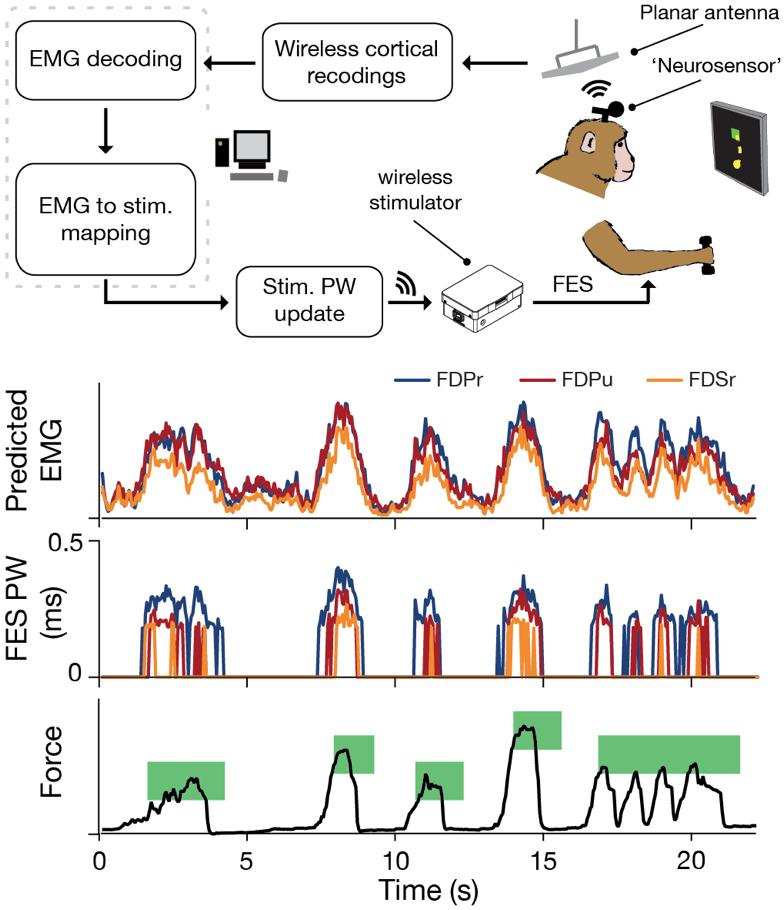
In 2012, we presented the first neuroprosthesis capable of restoring the ability to grasp objects during paralysis (Ethier et al., Nature 2012). This neuroprosthesis used muscle activation patterns, predicted from the ongoing activity of ~100 neurons recorded from the primary motor cortex (M1), to activate the paralyzed muscles through functional electrical stimulation (FES). Using this neuroprosthesis to overcome the effects of a reversible nerve block that paralyzed muscles of the hand and wrist, monkeys were able to perform functional tasks, such as grasping a ball, almost as successfully as they did before paralysis (see an example video here).
These experiments, as well as virtually all other brain-machine interface (BMI) experiments (Hochberg et al., 2012, Collinger et al., 2013, Bouton et al., 2016), lasted only a few hours, performed each day in a controlled environment. We are currently working to extend these methods to allow continuous use during many consecutive days in the monkey's home cage. To this end, we have integrated a wireless FES-BMI system (Figure 2), and developed a several-week-long reversible nerve block using tetrodotoxin (TTX). We hope to extend state-of-the-art continuous BMI use from a few hours to many consecutive days. With this paradigm, we will study the neural mechanisms by which the monkey adapts to the neuroprosthesis. We will also explore different approaches to guide the monkey's adaptation, with the ultimate goal of demonstrating its feasibility for clinical use.
↓ Jump to References
Cortical control of FES for locomotion
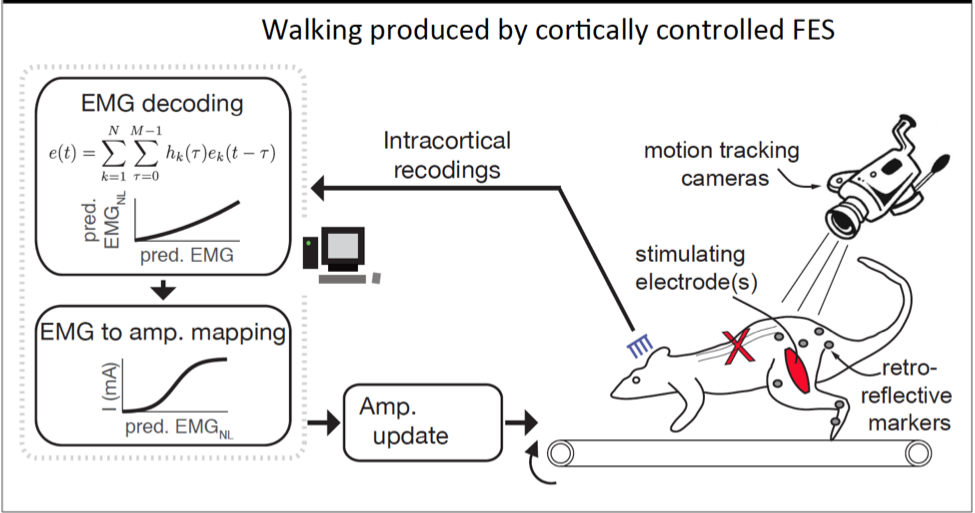
We have shown that FES driven by neural activity recorded from the motor cortex can be used to reestablish the ability to grasp and move objects despite paralysis. That work, in monkeys, used only temporary paralysis induced by peripheral nerve block. In order to move this technology closer to clinical application we have begun developing similar methods to restore locomotion to rats with spinal cord injury (SCI).
We are developing techniques to predict muscle activity during locomotion from hindlimb cortical activity and to restore hindlimb movements with FES. We record neural activity while rats run on a treadmill and measure hindlimb kinematics with a Vicon motion capture system. Added obstacles require the rats to plan and execute more complex, cortically-dependent movements. Our goal is to characterize the information content of the cortical activity under different locomotor conditions and evaluate its adequacy to serve as an FES control signal.
In parallel, we are using a real-time controllable 16-channel stimulator from Ripple to deliver FES to multiple hindlimb muscles. We implant intramuscular electrodes in ten muscles of the hindlimb of the rat. We have begun by using averages of previously recorded muscle activity (EMG) in normally-walking rats to specify the FES patterns, evaluating the complexity of the spatiotemporal stimulation pattern necessary to achieve functional locomotion (Fig 2). We further determined the necessary changes to the stimulation in order to adapt functional parameters of each step, such as length, height, and lateral motion. This work demonstrates that rats using a brain-control interface will be able to adapt stepping to changing environments.
Ultimately, we will use the estimates of motor intent obtained from cortical recordings to specify the FES control signals in animals with spinal cord injury, enabling restoration of voluntary locomotion and potentially facilitating functional rehabilitation (Fig 1).
References
[1] C. Ethier, E. R. Oby, M. J. Bauman, and L. E. Miller, "Restoration of grasp following paralysis through brain-controlled stimulation of muscles.," Nature, vol. 485, no. 7398, pp. 368-71, May 2012.
[2] Hochberg, L.R., et al., Reach and grasp by people with tetraplegia using a neurally controlled robotic arm. Nature, 2012. 485(7398): p. 372-5.
[3] Collinger, J.L., et al., High-performance neuroprosthetic control by an individual with tetraplegia. The Lancet, 2013. 381(9866): p. 557-564.
[4] Bouton, C.E., et al., Restoring cortical control of functional movement in a human with quadriplegia. Nature, 2016.
[5] Jarc AM, Berniker M, Tresch MC (2013) FES control of isometric forces in the rat hindlimb using many muscles. IEEE Transac- tions on Biomedical Engineering 60.5: 1422-1430