Development of somatosensory interfaces for the restoration of proprioception
Stimulation of somatosensory cortex to produce a sense of limb movement
Efferent Brain Machine Interfaces (BMI) that translate motor cortical activity into movement, have seen remarkable progress in the last decade, having evolved to the point where they can be used to control anthropomorphic robotic limbs (Hochberg et al. 2006; Collinger et al. 2013). At the same time, little progress has been made in restoring the somatosensation that is typically lost along the control of muscles, which is essential for normal movement. Quite recently, a great deal of interest has developed in using intracortical microstimulation (ICMS) to restore lost somatosensation. Of particular interest to our group is proprioception, the sense of limb position and movement.
ICMS was first used in human patients in the 1990's when researchers used electrodes implanted in the visual cortex of blind subjects to produce visual sensations (Bak et al. 1990; Schmidt et al. 1996). In animal work, a wide range of studies has shown that ICMS can produce detectable percepts in visual, auditory, and the tactile somatosensory cortices. This broad success has led us to pursue ICMS as a means to restore proprioception.
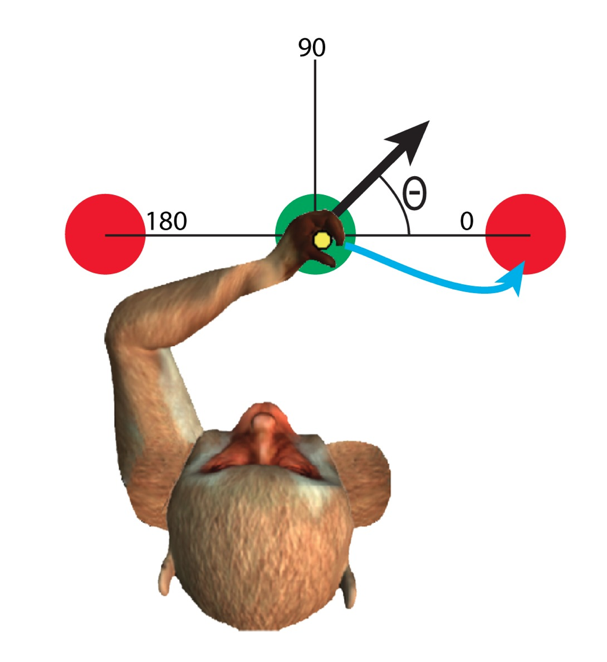
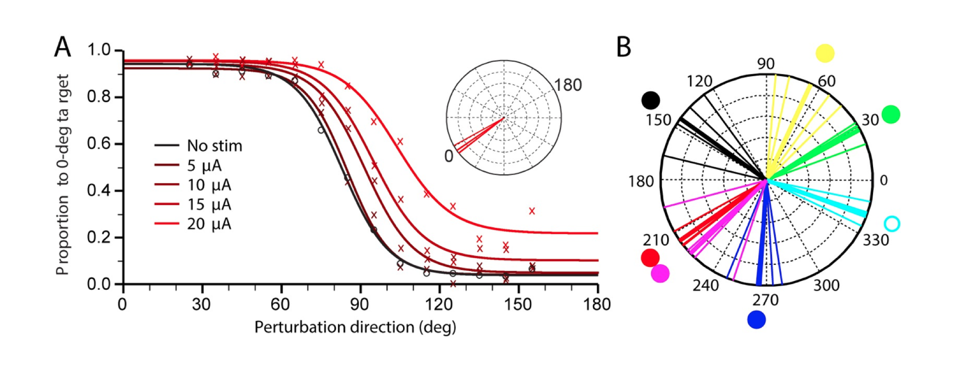
In preliminary studies we have had a monkey perform a psychophysical task to report the direction of small bumps applied to the monkey's hand. The monkey gripped the handle of a planar robot-arm that controlled the position of a cursor on a computer screen. The monkey was trained to reach to the one of two targets that was closer to the direction of the bump (see figure 1). When the bump is more nearly between the two targets, the task becomes more difficult. We plotted the proportion of times the monkey chose one of the two targets as a function of the bump direction. The resulting psychometric curve passed through 50% near 90°, and near 0% at the two extremes (Figure 2A, black line).
To test whether we could modify the natural sensation of limb motion with ICMS, we picked sets of four electrodes that recorded movement-related activity that peaked in roughly the same "preferred direction" (PD) of arm movement. We stimulated those four electrodes at the same time the hand was bumped. The stimulation biased the monkey's perception of the bump direction toward that of the electrodes' PDs (Figure 2A, red lines). Increasing the current increased the magnitude of the bias. We tested seven groups of electrodes in a single monkey, and six of these produced biases as hypothesized (Fig 2B).
We are now exploring methods of stimulating electrodes with dissimilar PDs with the goal of providing sensation that varies continuously both in time and direction, without an accompanying mechanical perturbation. We are working with Dr. Sliman Bensmaia at the University of Chicago, who is developing an analogous system to restore tactile sensation, and Dr. Warren Grill at Duke University who is developing models of the biophysical effects of stimulation. We plan to implant a monkey with a system that will use recordings from motor cortex to control movement, while simultaneously providing both touch and proprioceptive feedback via ICMS.
References
[1] Bak M, Girvin JP, Hambrecht FT, Kufta CV, Loeb GE, Schmidt EM (1990) Visual sensations produced by intracortical microstimulation of the human occipital cortex. Medical & Biological Engineering and Computing 28:257-259
[2] Collinger JL, Wodlinger B, Downey JE, et al. (2013) High-performance neuroprosthetic control by an individual with tetraplegia. The Lancet 381:557-564 doi: http://dx.doi.org/10.1016/S0140-6736(12)61816-9
[3] Hochberg LR, Serruya MD, Friehs GM, et al. (2006) Neuronal ensemble control of prosthetic devices by a human with tetraplegia. Nature 442:164-161kim171 doi: 10.1038/nature04970
[4] Schmidt E, Bak M, Hambrecht F, Kufta C, O'Rourke D, Vallabhanath P (1996) Feasibility of a visual prosthesis for the blind based on intracortical microsimulation of the visual cortex. Brain 119:507-522